双目测距的基本原理
单目测距原理:
先通过图像匹配进行目标识别(各种车型、行人、物体等),再通过目标在图像中的大小去估算目标距离。这就要求在估算距离之前首先对目标进行准确识别,是汽车还是行人,是货车、SUV还是小轿车。准确识别是准确估算距离的第一步。
单/双目方案的优点与难点
从上面的介绍,单目系统的优势在于成本较低,对计算资源的要求不高,系统结构相对简单;缺点是:
(1)需要不断更新和维护一个庞大的样本数据库,才能保证系统达到较高的识别率;
(2)无法对非标准障碍物进行判断;
(3)距离并非真正意义上的测量,准确度较低。
双目检测原理:

通过对两幅图像视差的计算,直接对前方景物(图像所拍摄到的范围)进行距离测量,而无需判断前方出现的是什么类型的障碍物。所以对于任何类型的障碍物,都能根据距离信息的变化,进行必要的预警或制动。双目摄像头的原理与人眼相似。人眼能够感知物体的远近,是由于两只眼睛对同一个物体呈现的图像存在差异,也称“视差”。物体距离越远,视差越小;反之,视差越大。视差的大小对应着物体与眼睛之间距离的远近,这也是3D电影能够使人有立体层次感知的原因。
双目测距的基本原理: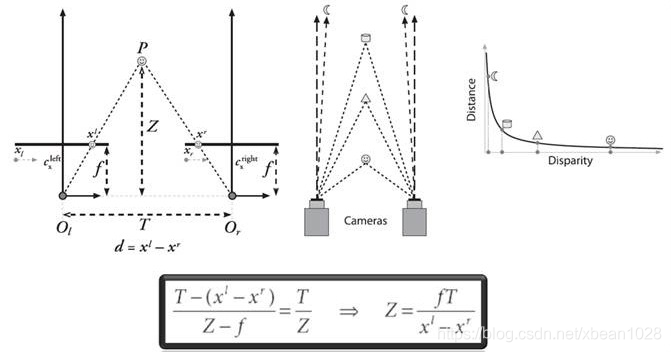
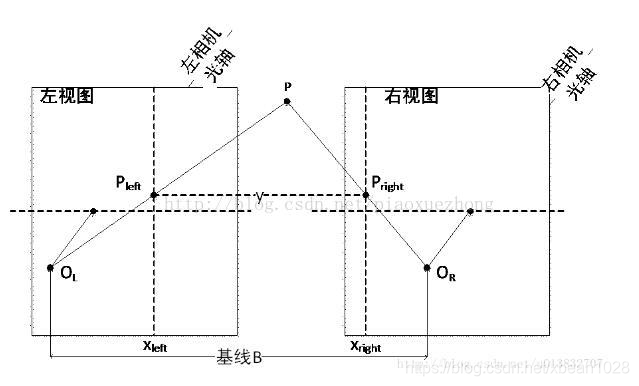
假设有一个点p,沿着垂直于相机中心连线方向上下移动,则其在左右相机上的成像点的位置会不断变化,即d=x1-x2的大小不断变化,并且点p和相机之间的距离Z跟视差d存在着反比关系。上式中视差d可以通过两个相机中心距T减去p点分别在左右图像上的投影点偏离中心点的值获得,所以只要获取到了两个相机的中心距T,就可以评估出p点距离相机的距离,这个中心距T也是双目标定中需要确立的参数之一。
双目立体视觉深度相机的深度测量过程,如下:
1、首先需要对双目相机进行标定,得到两个相机的内外参数、单应矩阵。
2、根据标定结果对原始图像校正,校正后的两张图像位于同一平面且互相平行。
3、对校正后的两张图像进行像素点匹配。
4、根据匹配结果计算每个像素的深度,从而获得深度图。
首先需要对双目相机进行标定
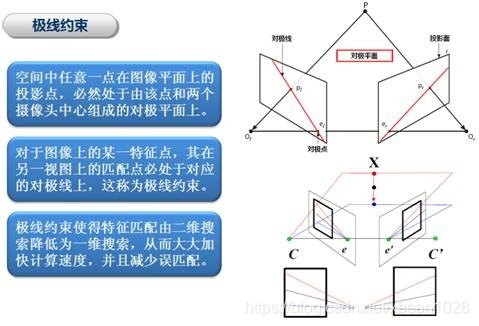
有一个前提就是要在两个相机成像上定位到同一个点p上,就是要把左右两个图片的点匹配起来,这就涉及到双目校正的动作。如果通过一幅图片上一个点的特征在另一个二维图像空间上匹配对应点,这个过程会非常耗时。为了减少匹配搜索的运算量,我们可以利用极限约束使得对应点的匹配由二维搜索空间降到一维搜索空间。
对校正后的两张图像进行像素点匹配。
根据极线约束的定义,我们可以在下图中直观的看到P2一定在对极线上,所以我们只需要沿着极线搜索一定可以找到和P1的对应点P2。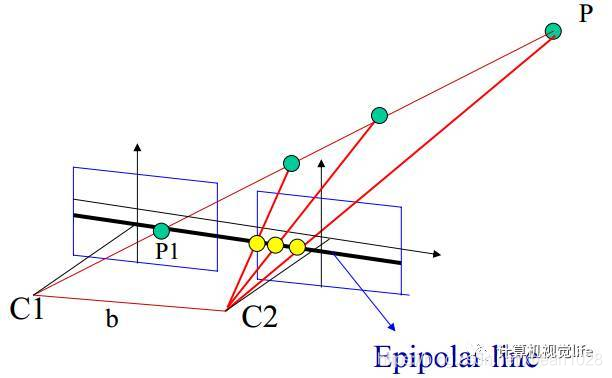
上述过程考虑的情况(两相机共面且光轴平行,参数相同)非常理想,相机C1,C2如果不是在同一直线上这种情况非常常见,因为有些场景下两个相机需要独立固定,很难保证光心C1,C2完全水平,即使是固定在同一个基板上也会因为装配的原因导致光心不完全水平。如下图所示。我们看到两个相机的极线不仅不平行,还不共面。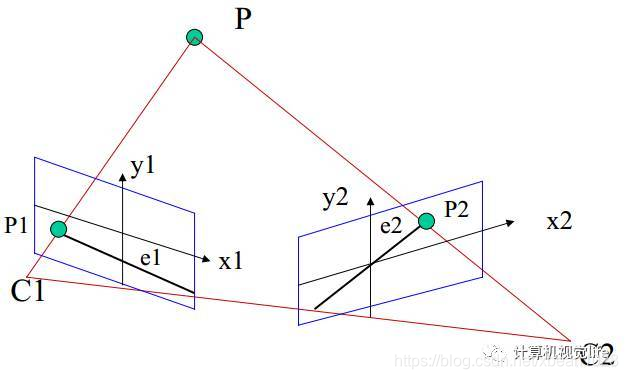
我们先来看看这种情况下拍摄的两张左右图片吧,如下所示。左图中三个十字标志的点,在右图中对应的极线是右图中的三条白色直线,也就是对应的搜索区域。我们看到这三条直线并不是水平的,如果进行逐点搜索效率非常低。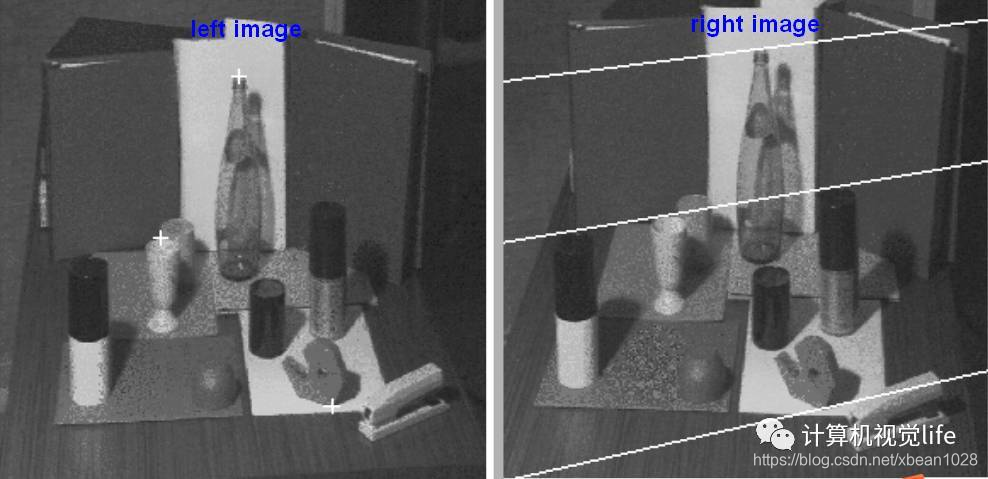
左图中三个点(十字标志)在右图中对应的极线是右图中的三条白色直线
根据标定结果对原始图像校正
要用双目校正把消除畸变后的两幅图像在水平方向严格的对齐,使得两幅图像的对极线恰好在同一水平线上,这样一幅图像上任意一点与其在另一幅图像上的匹配点就必然具有相同的行号,只需要在该行进行一维搜索就可匹配到对应点。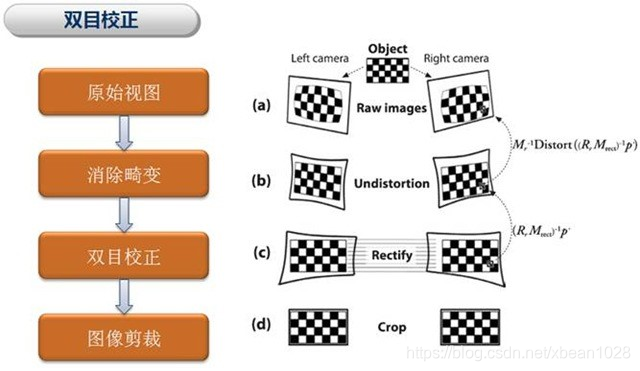
效果示例: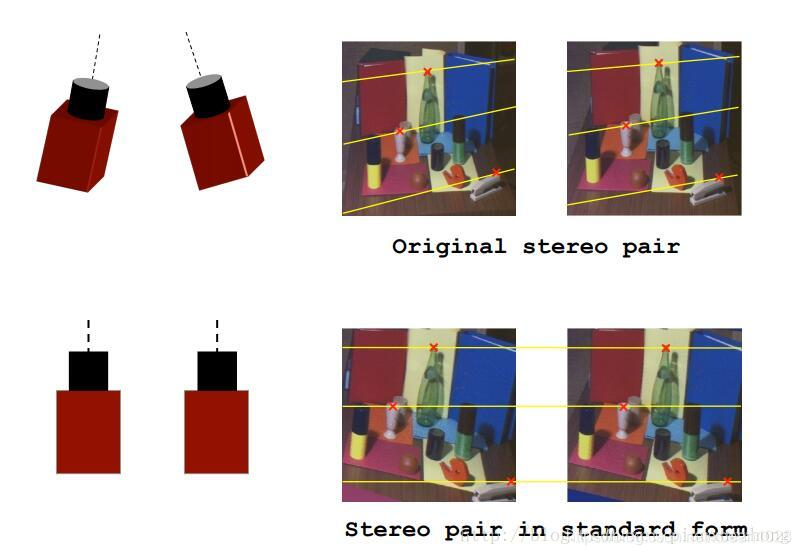
双目视觉的工作流程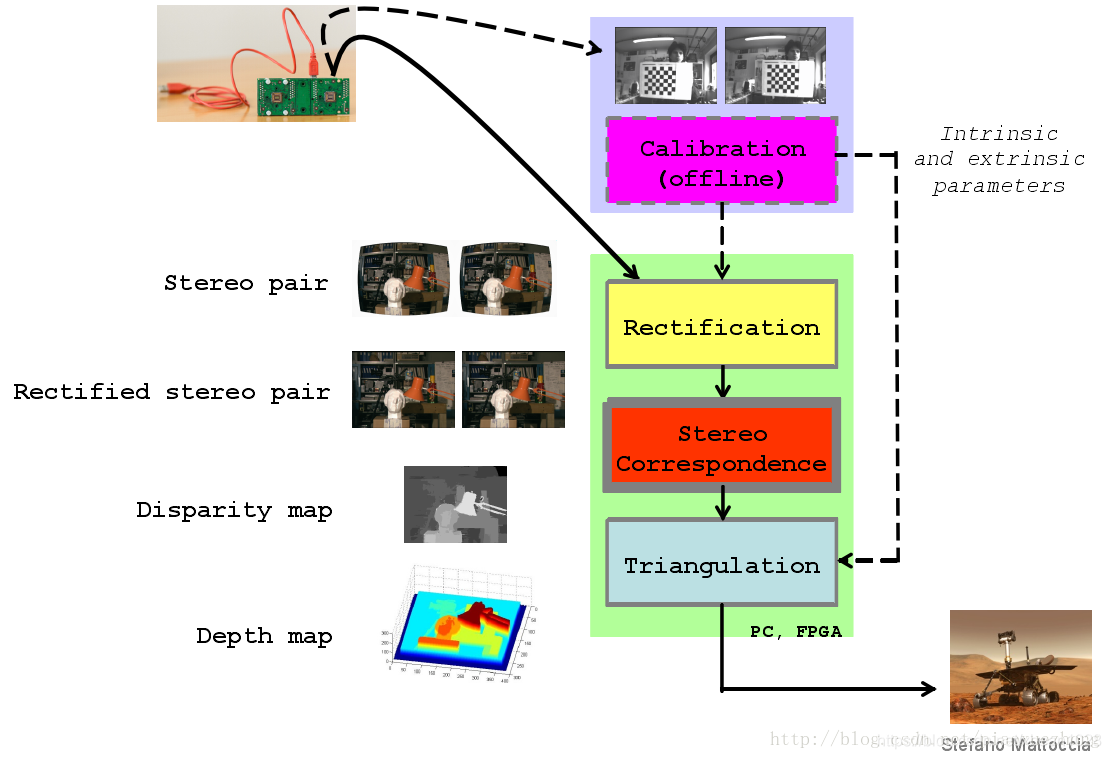
双目系统的难点:
计算量非常大,对计算单元的性能要求非常高,这使得双目系统的产品化、小型化的难度较大。所以在芯片或FPGA上解决双目的计算问题难度比较大。国际上使用双目的研究机构或厂商,绝大多数是使用服务器进行图像处理与计算,也有部分将算法进行简化后,使用FPGA进行处理。
对环境光照非常敏感。双目立体视觉法依赖环境中的自然光线采集图像,而由于光照角度变化、光照强度变化等环境因素的影响。
双目摄像头Stereolabs ZED 的安装使用:https://blog.csdn.net/xbean1028/article/details/94291663
参考文章:
https://my.oschina.net/abcijkxyz/blog/787652
https://blog.csdn.net/piaoxuezhong/article/details/79016615
http://www.sohu.com/a/203027140_100007727
Ursprünglicher Autor: Bean
Ursprünglicher Link: http://yoursite.com/2019/08/25/双目测距的基本原理/
Copyright-Erklärung: Bitte geben Sie die Quelle des Nachdrucks an.